

Relentless Tuning
You can purchase a basic suspension setup from any shop. After developing some confidence in the setup your riding skills evolve and that generic setup needs re-tuning. Suspensions can't be setup once-and-for-all, you can see that trackside at any national level race with teams frantically searching for a useable setup.
One of the hardest aspects of suspension tuning, a skill professional tuners spend years developing, is the capability to guess the combination of shim stack changes needed to achieve a specific effect.
ReStackor uses fundamental physics to compute the stiffness of shim stacks and relate changes in the shim stack structure to clicker settings giving you the capability to confidently tune complex shim stack configurations to achieve specific results. That gives you the capability to fine tune your suspension far beyond the limits previously possible.
Shock Absorber Basics
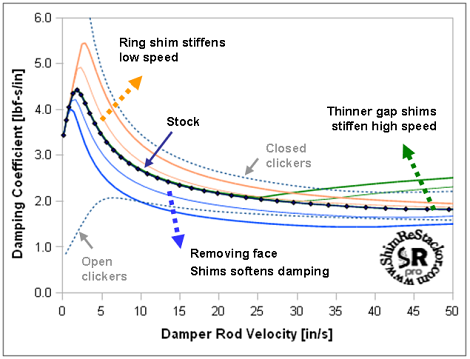
 Damping forces produced by a shock are the result of controlled fluid dynamic flow losses through the
suspension circuits. Flow losses are controlled by the stiffness of the shim stack on the shock absorber valve.
At low speed the shim stack is barely cracked open resulting in high jet velocities, high
flow losses and a high damping force.
As shaft speeds increase fluid pressure forces the stack to open further producing
a progressively
larger flow area and controlled progression of the shocks damping force.
Damping forces produced by a shock are the result of controlled fluid dynamic flow losses through the
suspension circuits. Flow losses are controlled by the stiffness of the shim stack on the shock absorber valve.
At low speed the shim stack is barely cracked open resulting in high jet velocities, high
flow losses and a high damping force.
As shaft speeds increase fluid pressure forces the stack to open further producing
a progressively
larger flow area and controlled progression of the shocks damping force.
ReStackor uses multi-physics simulations to model that process combining the fundamentals of structure mechanics with fluid dynamics to numerically model shim stack stiffness, flow area, fluid dynamic flow losses and the resulting shock absorber damping force.
Basing ReStackor calculations on the application of basic physics makes the calculations equally applicable to tuning of motorcycle suspensions, automotive racing shocks, trophy trucks or the setup of mountain bike suspensions.
Take the guesswork out of suspension tuning
The fundamentals of structure mechanics and fluid dynamics give ReStackor the capability to compute damping force as a function of shim stack structure, valve port geometry and clicker settings. ReStackor modeling of clicker settings lets you use your real world riding experience to tune the shim stack in terms of two clicks stiffer at low speed or three clicks softer at high speed referencing forces you can actually feel when you ride. The graphical environment and spreadsheet interface allow calculations to be easily run and results visually compared across the entire range of suspension velocities. ReStackor takes the guess work out of shim stack tuning so you can focus on the art of suspension tuning.
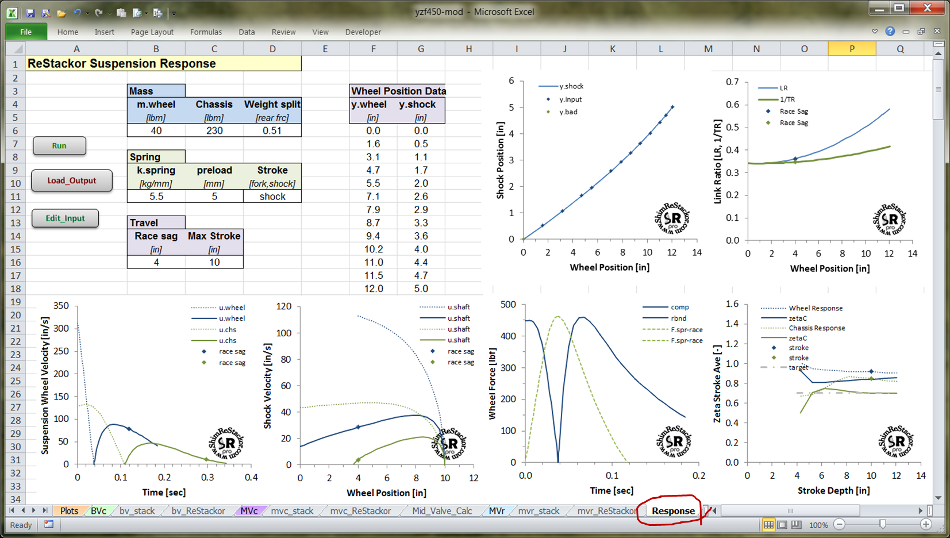
Suspension Response
ReStackor suspension response calculations compute the suspension link ratio from measurements of wheel and shock position. Suspension bottoming velocities are computed from inputs of weight and spring rate using the shocks damping force computed by ReStackor pro. Response outputs show the suspension velocities over the stroke, damping force and rebound response zeta coefficients. Response calculations are an add-on to ReStackor pro and run on the Response tab of ReStackor mid-valve spreadsheets.
Baseline suspension setup
Suspension tuning is a whole lot easier if you can start from a “good spot”. ReStackor suspension response calculations define the ballpark of where that “good spot” is using basic suspension tuning rules-of-thumb to define damping targets for compression and rebound:
-
Rebound damping: zeta values of 0.7 to 0.75
-
Rebound/Compression damping ratio:
-
Shock: 2. to 2.5:1
-
Fork: 3 to 3.5:1
-
-
Low speed compression: Damping ratio of 0.8:1 below suspension speed of 3 to 6 in/sec
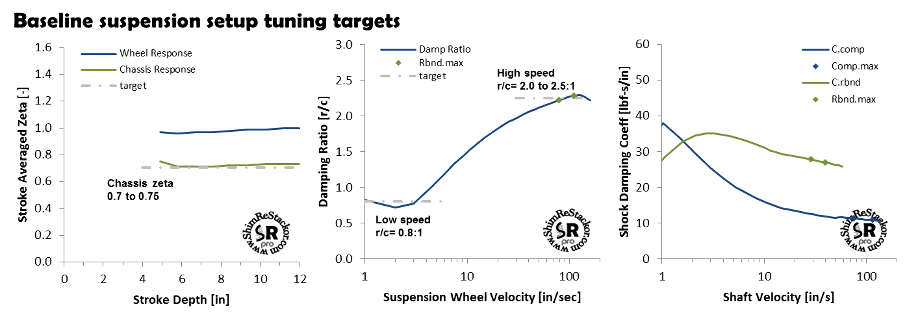
Spring-mass-damper theory defines rebound damping zeta values of 0.7 to give the fastest possible suspension response with damping that is still stiff enough to suppress suspension resonance motions. That fact sets rebound damping for the baseline setup at zeta values of 0.7 to 0.75. Go stiffer and the slow rebound response causes the suspension to pack. Go softer and the suspension baby-buggies.
Over a series of bumps suspensions will either pack or jack. To prevent packing suspensions need low speed compression damping to be slighter stiffer than rebound. The tuning target is a rebound/compression damping ratio of 0.8:1 below suspension speeds of 3 to 6 in/sec. That keeps the suspension riding “high in the stroke” over small trail trash bumps.
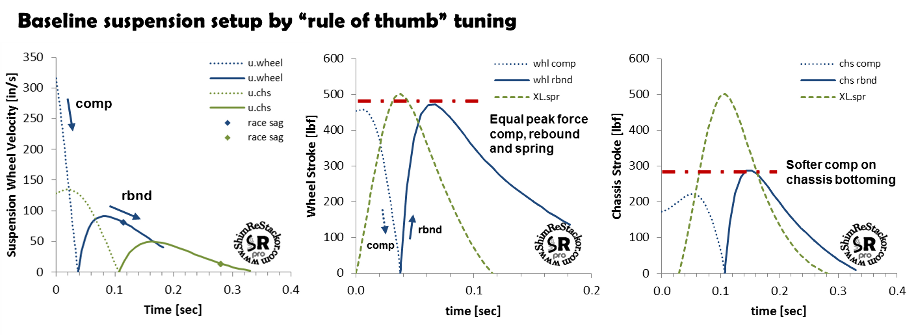
High speed compression damping is set by the ratio of rebound/compression damping. Baseline tuning sets peak compression damping forces to be approximately equal to rebound. That gives the suspension a consistent “feel” through the stroke. Outside that damping range you are better off going to a softer or stiffer spring. (more)
Relentless tuning
Whether your suspension was setup on a dyno; tuned by a professional stack guru; or the old school method of cut and try; performance comes down to how it rides. After months of "butt dyno" testing you may find your bike turns better with 10 wt oil gooing up the bleed circuits but the clickers then need to be four clicks out to handle whoops and you loose the low speed damping improvement. ReStackor takes that real world info and quantifies the damping force changes needed to keep the features and eliminate the unwanted side effects. The capability to relate clicker settings to stack stiffness gives you the capability to test and develop the suspension in-situ on the actual terrain, speed and conditions that you ride and fully account for all of the dynamic interactions of the chassis and suspension based on test rides when making fine tuning adjustments in the shim stack configuration.
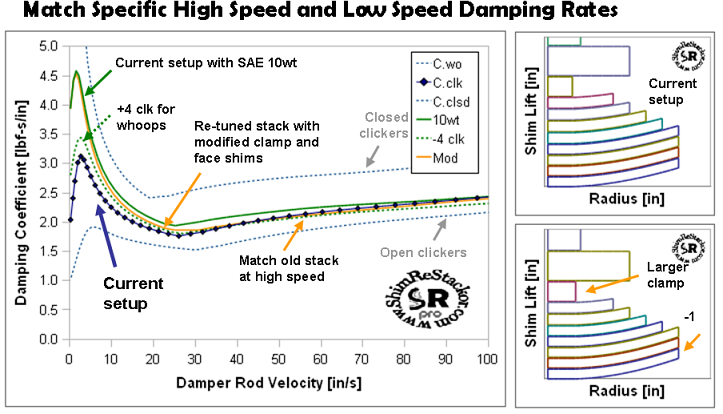
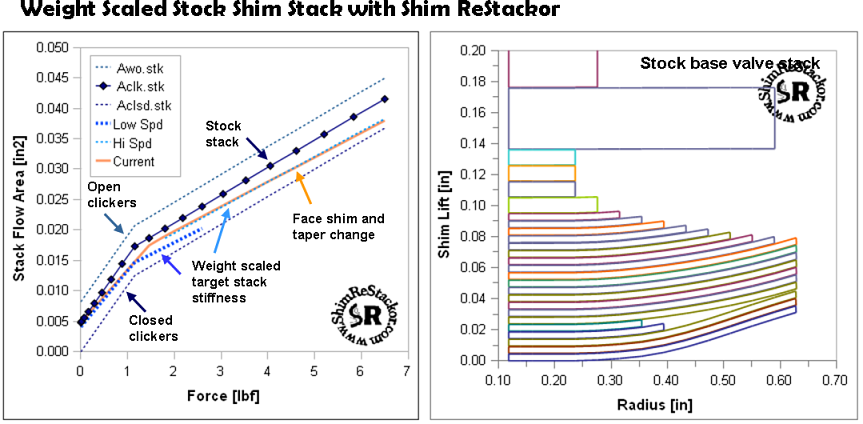
Shim stack retuned to match SAE 10wt oil at low speed and whoop damping at high speed.
The capability of ReStackor to accurately evaluate complex stack structures gives you the capability to tune the clamp shim diameter, stack taper and crossover shim to develop sophisticated damping profiles. Tuning in software gives you the capability to evaluate stack changes over the entire range of suspension speeds and avoid unexpected surprises after the stack is installed in the system. Relating stack stiffness and damping force to clicker settings gives you the capability to implement single click changes to the suspension and modify only the low speed or only high speed damping to confidently create the damping force curve you want. Your capability to perfect your suspension is only limited by your ability to complain about it. That may be nearly unlimited for some.
Develop An Initial Bike Setup or Fine Tuning a Suspension You Have Ridden For Years
Damping of a stock suspension system is designed around the weight and spring rate of the phantom stock factory rider. That tuning goes out the window when the bikes spring rate is changed to get your sag right. Restoring the setup to get the ride, feel, handling and suspension response the manufacture intended for your bike requires retuning damping to correct for the spring rate change. The basic process of weight scaling the stock setup to correct damping for the change in spring rate is enough to create a personalized "custom" setup for most riders.
Weight scaling uses the fundamentals of spring-mass-damper theory to scale the suspension response and performance of the stock suspension to correct for a change in weight and spring rate.
The capabilities of ReStackor go far beyond the basics of weight scaling. You can exchange stacks through web forums and weight scale the stack to your spring rate and weight so that you can test and feel the suspension response of the rider that originally developed the stack. Shim stacks can be fine tuned in terms of clicker settings allowing you to relentlessly pursue refinement of the suspension setup. Effects of stack taper changes can be evaluated across the entire range of wheel speeds and referenced to you current stack to quantify effects of the change. Crossover shims can be designed to close at specific suspension velocities on a specific bump height giving you the capability to develop sophisticated damping profiles. The capability to evaluate stack modifications in software before committing those changes to your bike helps prevent wasting your time installing and testing stacks that are way too stiff or changes that are so slight they make no real difference.
Whether you are working on the initial suspension setup or fine tuning a suspension you have ridden for years ReStackor takes the guess work out of shim stack tuning giving you the capability to accurately tune complex shim stacks and confidently refine and fine tune your suspension far beyond the limits previously possible.
Shim ReStackor Buy Now ReStackor pro
